Robotics Projects (WIP)
A script written in C++ which allows a drone to follow AprilTag markers autonomously in offboard mode.
Obstacle detection and localization using UV Depth segmentation method for drones.
Offboard C++ code controlling drone motion simulated in PX4 Software-in-the-Loop simulation.
Swarm robotics project on visual recognition based swarm control.
Trajectory control of Modal AI PX4 multicopter with waypoint navigation.
Wall-following algorithm implementation using OOP for micromouse navigation in mazes.
A* Path Planning Simulation
Turtlebot3 Navigation Demo
A* algorithm implementation on Turtlebot3 simulated in ROS Noetic and Gazebo.
ENPM808X Mid-semester project on Ackermann Steering Controller using C++ dev, GitHub CI and Unit Testing.
Agile Robotics for Industrial Automation Competition project.
Wheeled manipulator designed and simulated to perform autonomous pick and place tasks in warehouse environments.
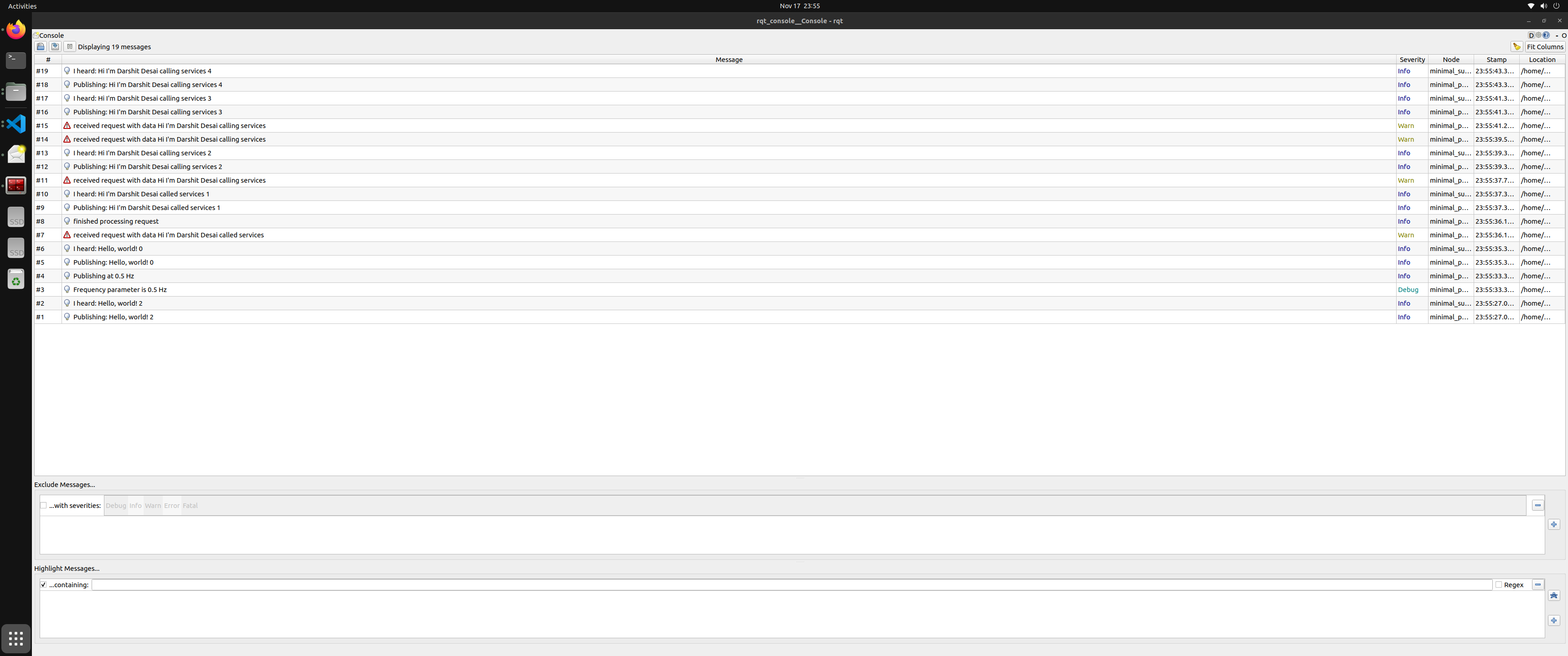
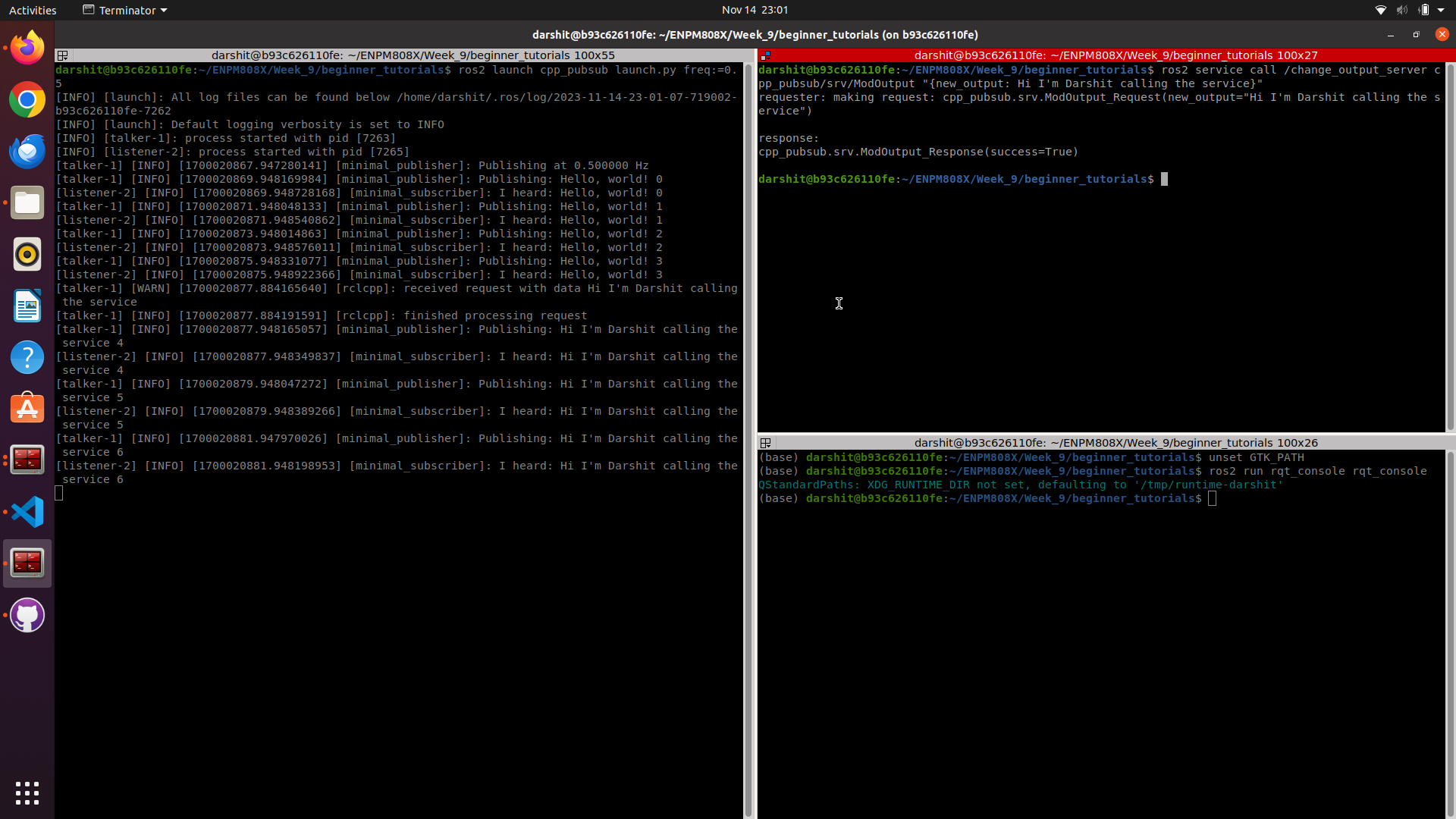
ROS2 ENPM808X assignment repository for beginner tutorials.
LTI LQR Controller Response
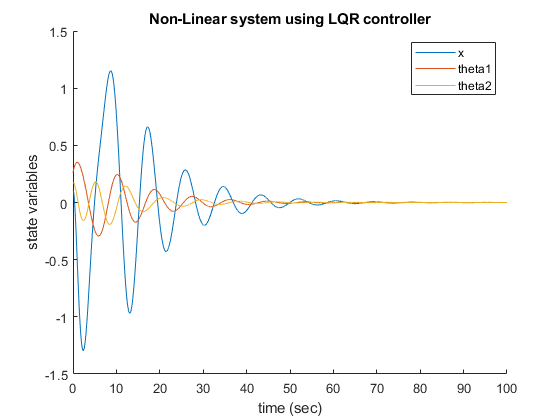
Nonlinear LQR Controller Response
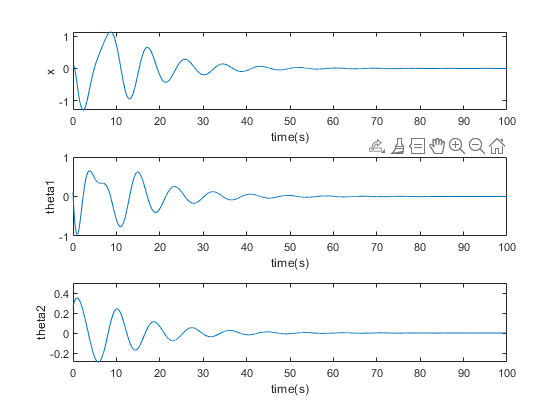
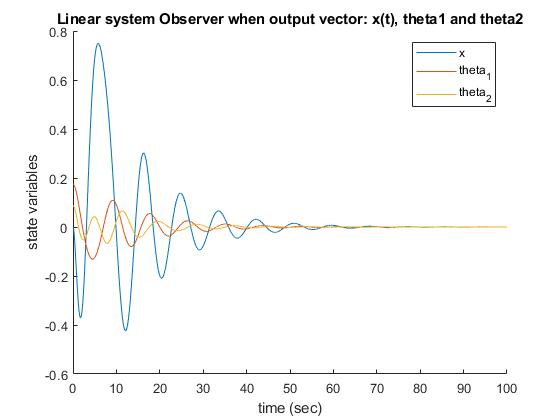
Linear System: X, θ₁, θ₂ States
LQG Controller with Observer
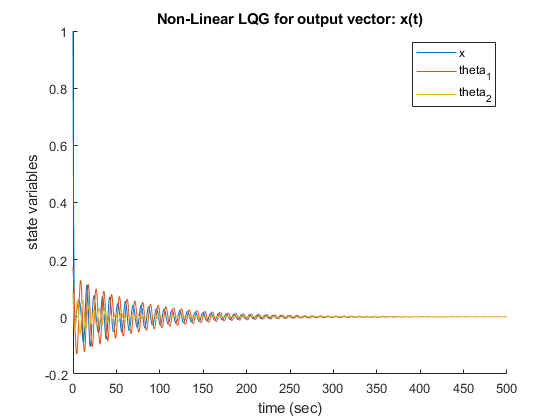
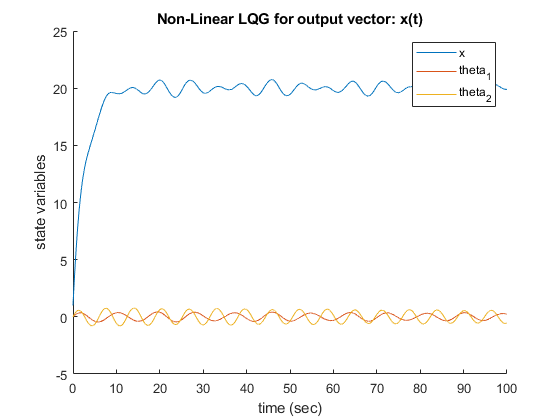
LQG Reference Tracking Performance
Modeling and implementation of LQR and LQG controllers for a double pendulum on a moving cart system.
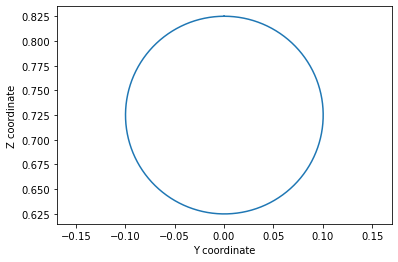
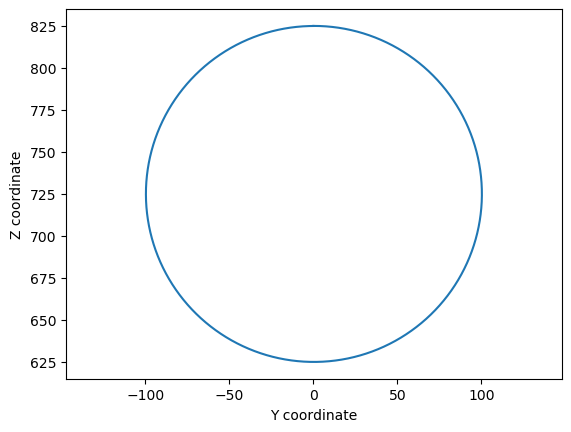
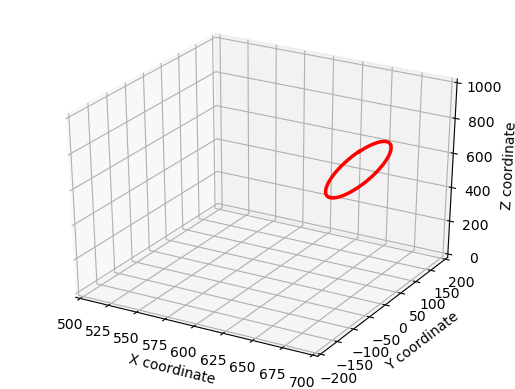
2D Pen Trajectory - Y-Z Plane
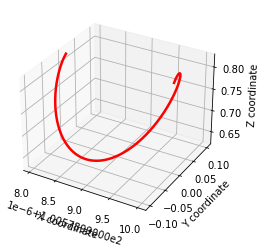
3D Trajectory Visualization
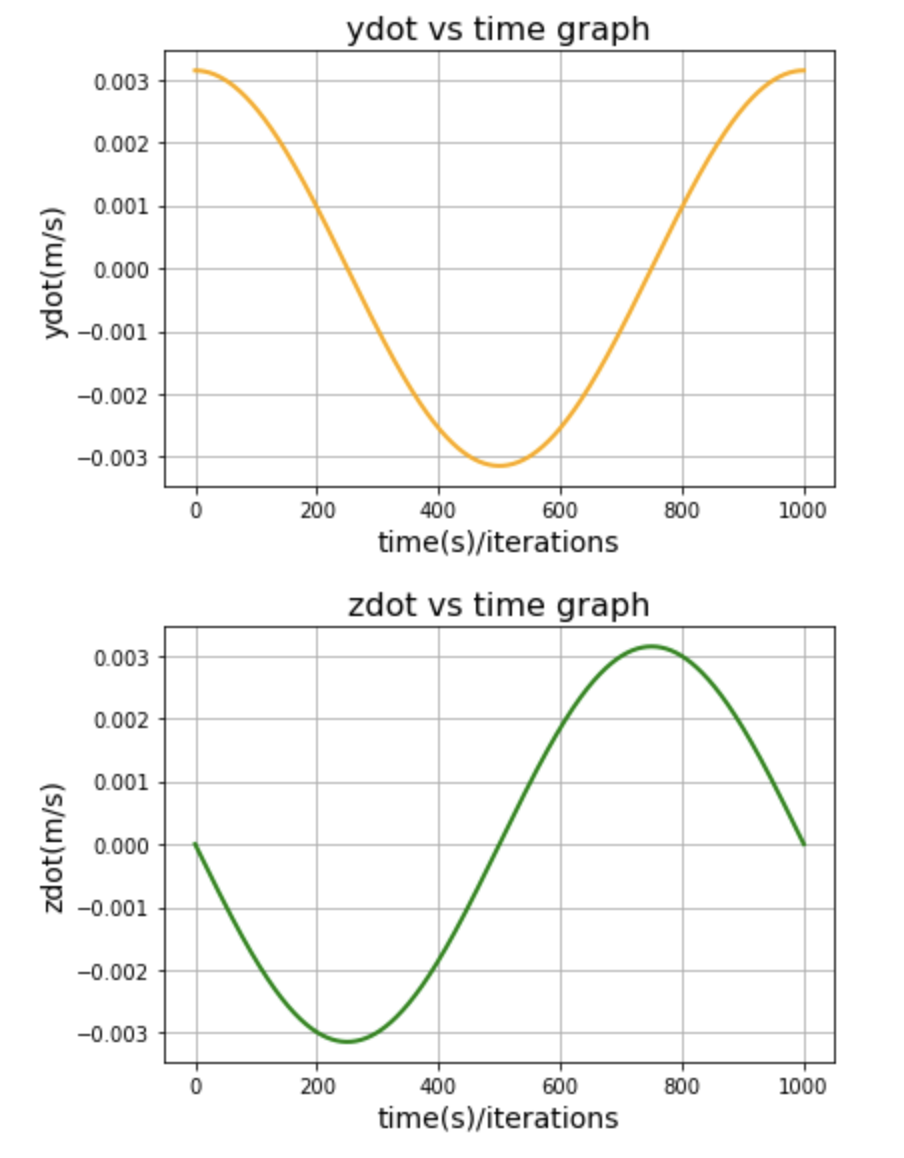
End-Effector Velocity Trajectory
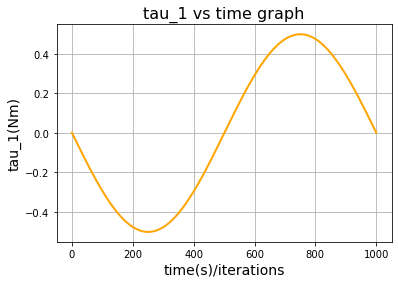
Torque Outputs - Joint 1
Dynamics modeling of the Panda robot to draw a circle on Y-Z Plane.
Kinematics modeling of the Panda robot to draw a circle on Y-Z Plane.
Final project using ROS2 Galactic to control Turtlebot's motion using fiducial markers.
Swarm Formation - Circle Pattern
Swarm Demonstration Video
ENPM808X Final Project on Ground Robot Swarm with C++ dev, GitHub CI and Integration Tests.
A repo for walking the Turtlebot around an obstacle map with roomba-style navigation.
PointNet implementation for 3D object classification and recognition algorithm, part of the 3D vision course.
Single Image to 3D reconstruction implementation.
PyTorch3D rendering and visualization basics.
Ball trajectory curve and landing point calculation from video using OpenCV Python.
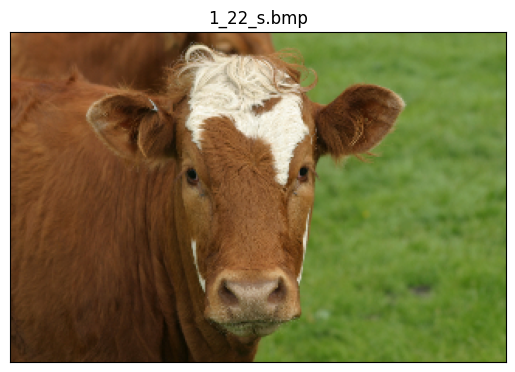
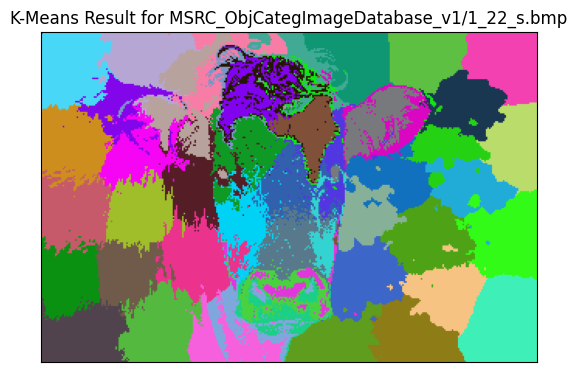
Original MSRC Dataset Input Image
K-Means Cluster Centers Visualization
K-Means Color Clustered Image
SLIC Algorithm Superpixel Segmentation
Superpixel Boundary Visualization
Extracted Superpixel Patches for VGG16
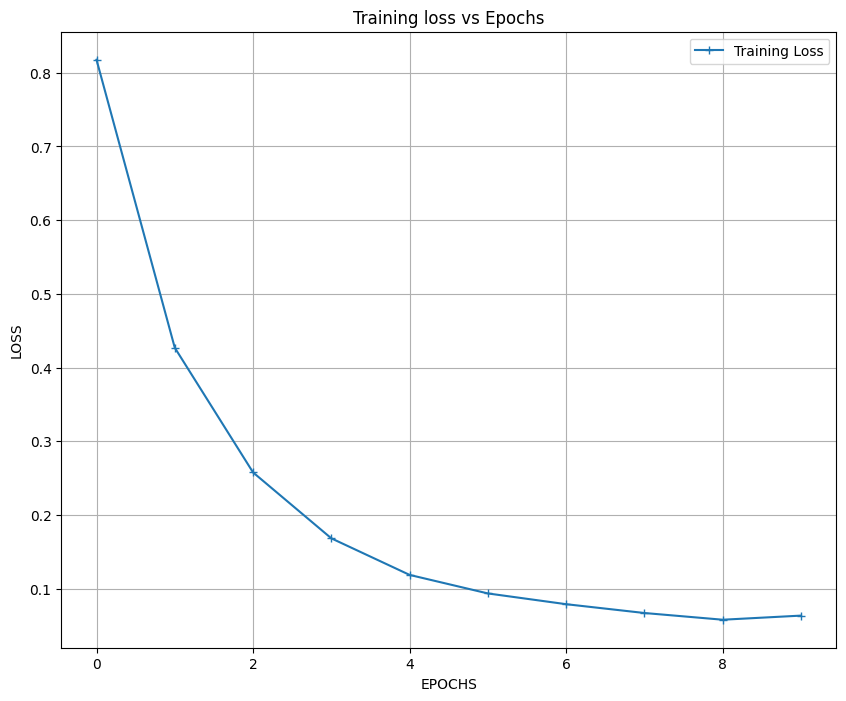
VGG16 Network Training Loss Curve
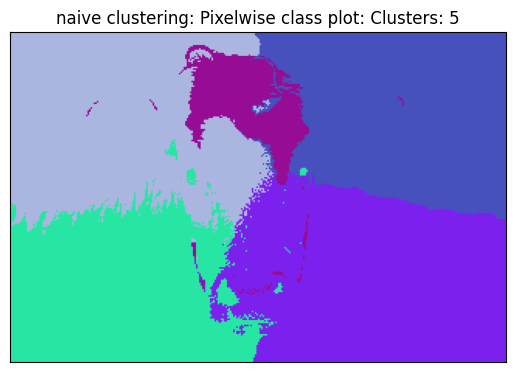
Final Semantic Segmentation Result
Implementation of VGG16 network to segment images using SLIC Superpixels.
Meta Learning Based Implicit Neural Representations combined with Grid-Based INR for CMSC828I final project.
Neural Radiance Fields volume rendering for 3D vision applications.
A* algorithm implementation for a non-holonomic mobile robot with obstacle map navigation.
Dijkstra algorithm implementation for a point robot with obstacle map navigation.
Paper reviews on state-of-the-art 3D Computer Vision topics in SfM, Dense Visual SLAM, Multi-view geometry, and Point Cloud Processing.
Sequential algorithm for pick and place robot using C++.
A PID control program for Acme Robotics using test driven development.
Pair programming implementation of PID control using test driven development.
Project Presentation