|
| static int | mazeWidth () |
| | Compute the width of the maze. More...
|
| |
| static int | mazeHeight () |
| | Compute the height of the maze. More...
|
| |
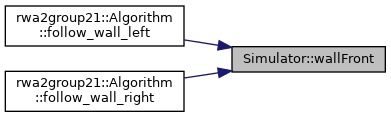
| static bool | wallFront () |
| | Check if there is a wall in front of the robot. More...
|
| |
| static bool | wallRight () |
| | Check if there is a wall to the right of the robot. More...
|
| |
| static bool | wallLeft () |
| | Check if there is a wall to the left of the robot. More...
|
| |
| static void | moveForward (int distance=1) |
| | Move the robot forward. More...
|
| |
| static void | turnRight () |
| | Turn the robot right. More...
|
| |
| static void | turnLeft () |
| | Turn the robot left. More...
|
| |
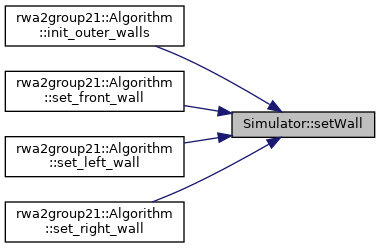
| static void | setWall (int x, int y, char direction) |
| | Set a wall at the given coordinates. More...
|
| |
| static void | clearWall (int x, int y, char direction) |
| | Remove a wall at the given coordinates. More...
|
| |
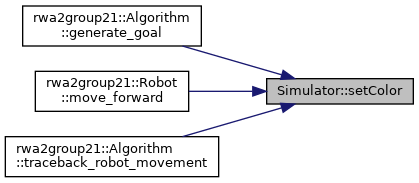
| static void | setColor (int x, int y, char color) |
| | Set the color of the cell at the given coordinates. More...
|
| |
| static void | clearColor (int x, int y) |
| | Clear the color of the cell at the given coordinates. More...
|
| |
|
static void | clearAllColor () |
| | Clear the color of all cells in the maze.
|
| |
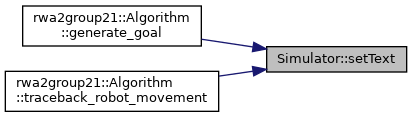
| static void | setText (int x, int y, const std::string &text) |
| | Set the text in a cell at the given coordinates. More...
|
| |
| static void | clearText (int x, int y) |
| | Clear the text in a cell at the given coordinates. More...
|
| |
| static void | clearAllText () |
| | Clear the text in all cells of the maze. More...
|
| |
| static bool | wasReset () |
| | Check wether or not the reset button has been pressed. More...
|
| |
|
static void | ackReset () |
| | Moves the robot back to the starting position.
|
| |
◆ clearAllText()
| void Simulator::clearAllText |
( |
| ) |
|
|
static |
Clear the text in all cells of the maze.
◆ clearColor()
| void Simulator::clearColor |
( |
int |
x, |
|
|
int |
y |
|
) |
| |
|
static |
Clear the color of the cell at the given coordinates.
- Returns
- int X coordinate of the cell.
-
int Y coordinate of the cell.
◆ clearText()
| void Simulator::clearText |
( |
int |
x, |
|
|
int |
y |
|
) |
| |
|
static |
Clear the text in a cell at the given coordinates.
- Parameters
-
| x | X coordinate of the cell. |
| y | Y coordinate of the cell. |
◆ clearWall()
| void Simulator::clearWall |
( |
int |
x, |
|
|
int |
y, |
|
|
char |
direction |
|
) |
| |
|
static |
Remove a wall at the given coordinates.
- Parameters
-
| x | X coordinate of the cell. |
| y | Y coordinate of the cell. |
| direction | direction Direction of the wall. Can be 'n', 's', 'e', 'w'. |
◆ mazeHeight()
| int Simulator::mazeHeight |
( |
| ) |
|
|
static |
Compute the height of the maze.
- Returns
- int Height of the maze.
◆ mazeWidth()
| int Simulator::mazeWidth |
( |
| ) |
|
|
static |
Compute the width of the maze.
- Returns
- int Width of the maze.
◆ moveForward()
| void Simulator::moveForward |
( |
int |
distance = 1 | ) |
|
|
static |
Move the robot forward.
- Parameters
-
| distance | Distance (number of cell) to move forward. |
◆ setColor()
| void Simulator::setColor |
( |
int |
x, |
|
|
int |
y, |
|
|
char |
color |
|
) |
| |
|
static |
Set the color of the cell at the given coordinates.
- Parameters
-
| x | X coordinate of the cell. |
| y | Y coordinate of the cell. |
| color | Color of the cell. Can be 'k' (black), 'b' (blue), 'a' (Gray), 'c' (cyan), 'g' (green), 'o' (orange), 'r' (red), 'w' (white), 'y' (yellow) 'B' (dark blue), 'C' (dark cyan), 'A' (dark gray), 'G' (dark green), 'R' (dark green), 'Y' (dark yellow). |
◆ setText()
| void Simulator::setText |
( |
int |
x, |
|
|
int |
y, |
|
|
const std::string & |
text |
|
) |
| |
|
static |
Set the text in a cell at the given coordinates.
- Parameters
-
| x | X coordinate of the cell. |
| y | Y coordinate of the cell. |
| text | Text to display in the cell. |
◆ setWall()
| void Simulator::setWall |
( |
int |
x, |
|
|
int |
y, |
|
|
char |
direction |
|
) |
| |
|
static |
Set a wall at the given coordinates.
- Parameters
-
| x | X coordinate of the cell. |
| y | Y coordinate of the cell. |
| direction | Direction of the wall. Can be 'n', 's', 'e', 'w'. |
◆ turnLeft()
| void Simulator::turnLeft |
( |
| ) |
|
|
static |
◆ turnRight()
| void Simulator::turnRight |
( |
| ) |
|
|
static |
◆ wallFront()
| bool Simulator::wallFront |
( |
| ) |
|
|
static |
Check if there is a wall in front of the robot.
- Returns
- true
-
false
◆ wallLeft()
| bool Simulator::wallLeft |
( |
| ) |
|
|
static |
Check if there is a wall to the left of the robot.
- Returns
- true
-
false
◆ wallRight()
| bool Simulator::wallRight |
( |
| ) |
|
|
static |
Check if there is a wall to the right of the robot.
- Returns
- true
-
false
◆ wasReset()
| bool Simulator::wasReset |
( |
| ) |
|
|
static |
Check wether or not the reset button has been pressed.
- Returns
- true
-
false
The documentation for this class was generated from the following files:
- /home/darshit/Desktop/Maze-Solver-simulation-using-Wall-Following-Algorithm-OOP/application/simulator/simulator.h
- /home/darshit/Desktop/Maze-Solver-simulation-using-Wall-Following-Algorithm-OOP/application/simulator/simulator.cpp